|
|

|

|
| e-Pub |
Section: Research Program
Main Vision
The vision of Rainbow (and foreseen applications) calls for several general scientific challenges: high-level of autonomy for complex robots in complex (unstructured) environments, forward interfaces for letting an operator giving high-level commands to the robot, backward interfaces for informing the operator about the robot `status', user studies for assessing the best interfacing, which will clearly depend on the particular task/situation. Within Rainbow we plan to tackle these challenges at different levels of depth:
-
the methodological and algorithmic side of the sought human-robot interaction will be the main focus of Rainbow. Here, by also exploiting the previous Lagadic expertise, we will be interest in advancing the state-of-the-art in sensor-based online planning, control and manipulation for mobile/fixed robots. For instance, while classically most control approaches (especially those sensor-based) have been essentially reactive, we believe that less myopic strategies based on online/reactive trajectory optimization will be needed for the future Rainbow activities. The core ideas of Model-Predictive Control approaches (also known as Receding Horizon) or, in general, numerical optimal control methods will play a role in the Rainbow activities, for allowing the robots to reason/plan over some future time window and better cope with constraints. We will also consider extending classical sensor-based motion control/manipulation techniques to more realistic scenarios, such as deformable/flexible objects (“Advanced Sensor-based Control” axis). Finally, it will also be important to spend research efforts into the field of Optimal Sensing, in the sense of generating (again) trajectories that can optimize the state estimation problem in presence of scarce sensory inputs and/or non-negligible measurement and process noises, especially true for the case of mobile robots (“Optimal and Uncertainty-Aware Sensing” axis). We also aim at addressing the case of coordination between a single human user and multiple robots where, clearly, as explained the autonomy part plays even a more crucial role (no human can control multiple robots at once, thus a high degree of autonomy will be required by the robot group for executing the human commands);
-
the interfacing side will also be a focus of the Rainbow activities. As explained above, we will be interested in both the forward (human robot) and backward (robot human) interfaces. The forward interface will be mainly addressed from the algorithmic point of view, i.e., how to map the few degrees of freedom available to a human operator (usually in the order of 3–4) into complex commands for the controlled robot(s). This mapping will typically be mediated by an “AutoPilot” onboard the robot(s) for autonomously assessing if the commands are feasible and, if not, how to least modify them (“Advanced Sensor-based Control” axis).
The backward interface will, instead, mainly consist of a visual/haptic feedback for the operator. Here, we aim at exploiting our expertise in using force cues for informing an operator about the status of the remote robot(s). However, the sole use of classical grounded force feedback devices (e.g., the typical force-feedback joysticks) will not be enough due to the different kinds of information that will have to be provided to the operator. In this context, the recent interest in the use of wearable haptic interfaces is very interesting and will be investigated in depth (these include, e.g., devices able to provide vibro-tactile information to the fingertips, wrist, or other parts of the body). The main challenges in these activities will be the mechanical conception (and construction) of suitable wearable interfaces for the tasks at hand, and in the generation of force cues for the operator: the force cues will be a (complex) function of the robot state, therefore motivating research in algorithms for mapping the robot state into a few variables (the force cues) (“Haptics for Robotics Applications” axis);
-
the evaluation side that will assess the proposed interfaces with some user studies, or acceptability studies by human subjects. Although this activity will not be a main focus of Rainbow (complex user studies are beyond the scope of our core expertise), we will nevertheless devote some efforts into having some reasonable level of user evaluations by applying standard statistical analysis based on psychophysical procedures (e.g., randomized tests and Anova statistical analysis). This will be particularly true for the activities involving the use of smart wheelchairs, which are intended to be used by human users and operate inside human crowds. Therefore, we will be interested in gaining some level of understanding of how semi-autonomous robots (a wheelchair in this example) can predict the human intention, and how humans can react to a semi-autonomous mobile robot.
|
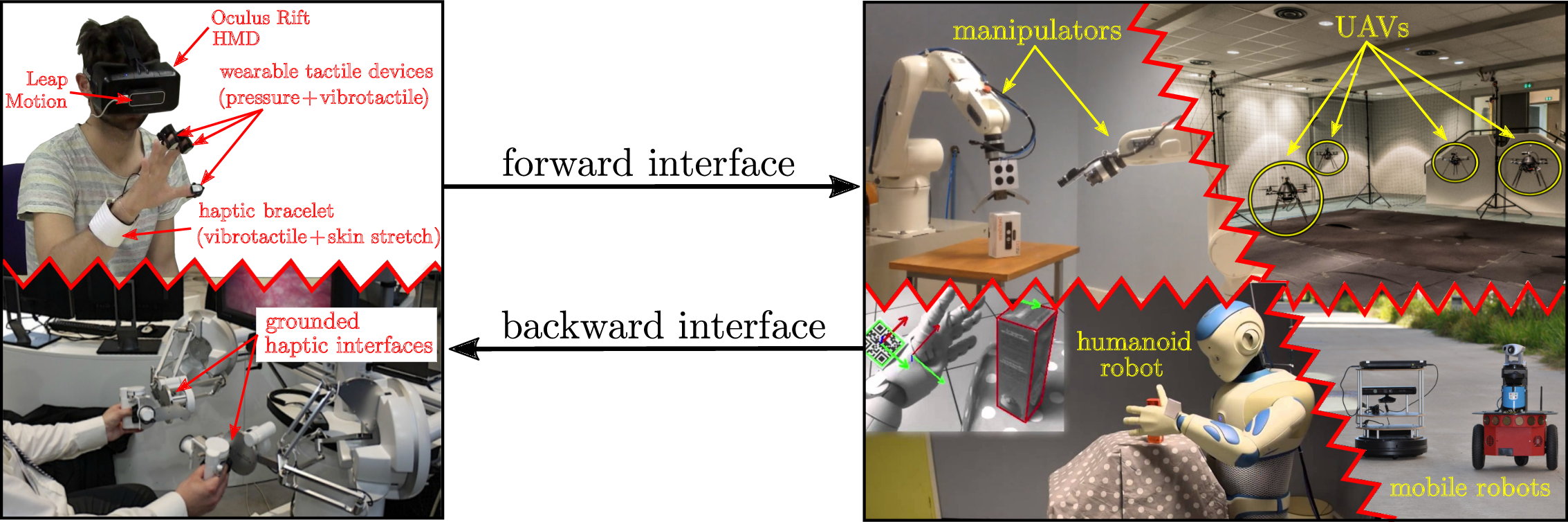
Figure 1 depicts in an illustrative way the prototypical activities foreseen in Rainbow. On the righthand side, complex robots (dual manipulators, humanoid, single/multiple mobile robots) need to perform some task with high degree of autonomy. On the lefthand side, a human operator gives some high-level commands and receives a visual/haptic feedback aimed at informing her/him at best of the robot status. Again, the main challenges that Rainbow will tackle to address these issues are (in order of relevance): methods and algorithms, mostly based on first-principle modeling and, when possible, on numerical methods for online/reactive trajectory generation, for enabling the robots with high autonomy; design and implementation of visual/haptic cues for interfacing the human operator with the robots, with a special attention to novel combinations of grounded/ungrounded (wearable) haptic devices; user and acceptability studies.